 風向風速計
風向風速計 超音波センサー&ロボット
超音波センサー&ロボットアンドロイド端末のリモコンアプリArduinoRC(Ioannis Tzanellis様提供)の設定手順

|
PlayストアからArduinoRCをダウンロードしてください。 |
| MB_demoが書き込まれているUSドロイド君にBluetoothインターフェースボードを取付けて電源を入れます。 MB_demoの書き込み方はmb_simpleの書き込み方のページを参照してください。 MB_simpleのアップロード手順 |
|
|
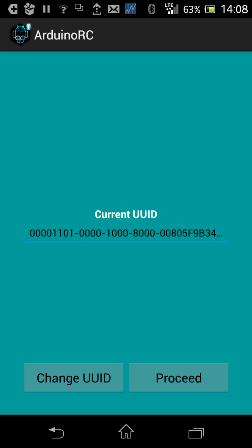
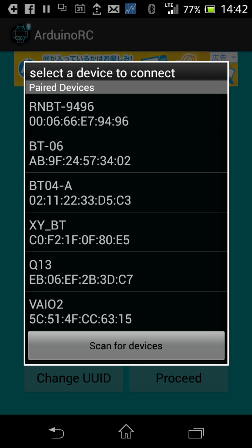
ArduinoRCアプリを起動し、「Proceed」ボタンにタッチするとペアリング済みのBluetoothデバイスが一覧表示されます。 MiniBotに取り付けたBluetoothインターフェースボードとペアリング済ならデバイス名にタッチします。 ペアリング済でないときは「Scan for devices」にタッチしてペアリングします。 |
ジェスチャーリモコンの設定手順を説明します。

|
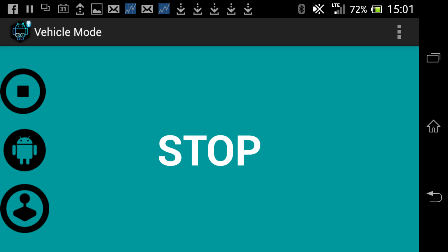
接続が完了すると4つのボタンのメニュー画面が表示されるので、「Vehicle Mode」ボタンにタッチします。 |
|
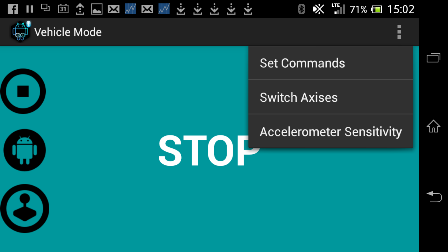
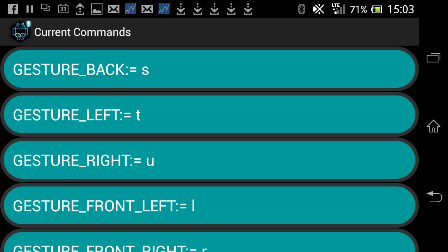
Vehicle Mode画面の右上の設定ボタンにタッチして「Set Commnads」を選択します。 |
|
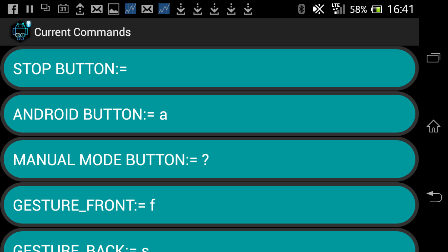
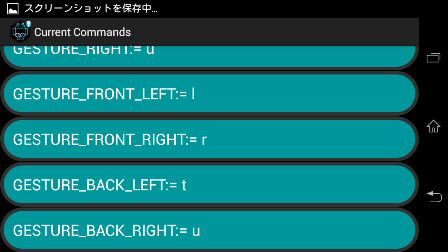
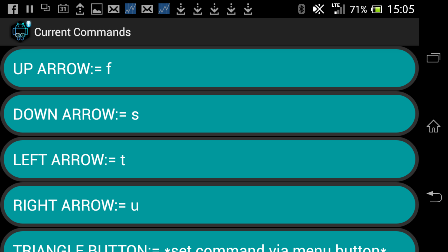
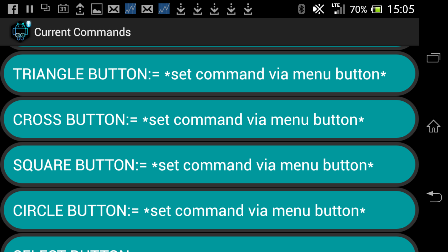
各ボタンに図のように1文字ずつのアルファベットを設定します。(STOP BUTTON:=は文字無しにしてください) |
|
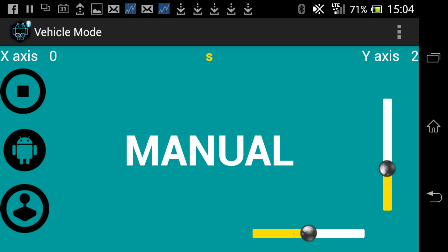
Vehicle Mode画面に戻って左下のボタンにタッチするとジェスチャーリモコンの画面になってMANUALと表示されます。 |
| 動画のように操作できます。 リモコン操作中でも障害物を発見すると停止し、旋回コマンドにだけ反応するようになっています。 障害物の検出距離はEEPROMデーターを書き換えることで変更でき、検出距離を0にすることで無視するようにも設定できます。 |
|
|
左上のSTOPボタンにタッチしてジェスチャーリモコンの動作を停止させてから左中央のAndroidボタンにタッチすると、振付コードの手順に従って自動走行します。 自動走行を停止させるときはもう一度Androidボタンにタッチします。 |
| 振付コードに従って自動走行中です。 |
コントローラーリモコンの設定手順を説明します。
|
|
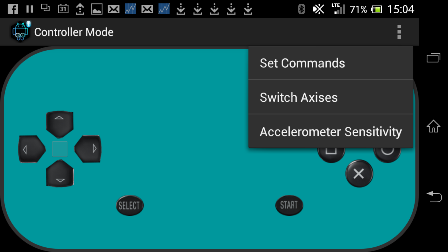
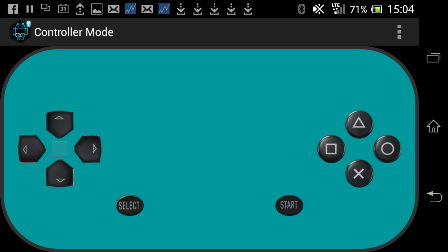
メニュー画面に戻り、「Controller Mode」ボタンにタッチします。 |
|
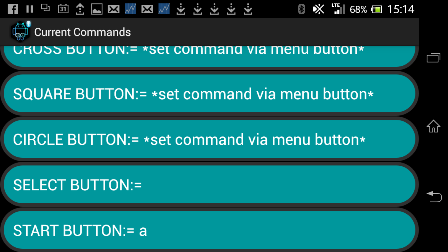
Controller Mode画面の右上の設定ボタンにタッチして「Set Commnads」を選択します。 |
|
上下左右矢印ボタンとSTARTボタンに図のように1文字ずつのアルファベットを設定します。 |
|
Controller Mode画面に戻ると設定したボタンでコントロールできます。 |
| 動画のように操作できます。 |