 風向風速計
風向風速計 超音波センサー&ロボット
超音波センサー&ロボット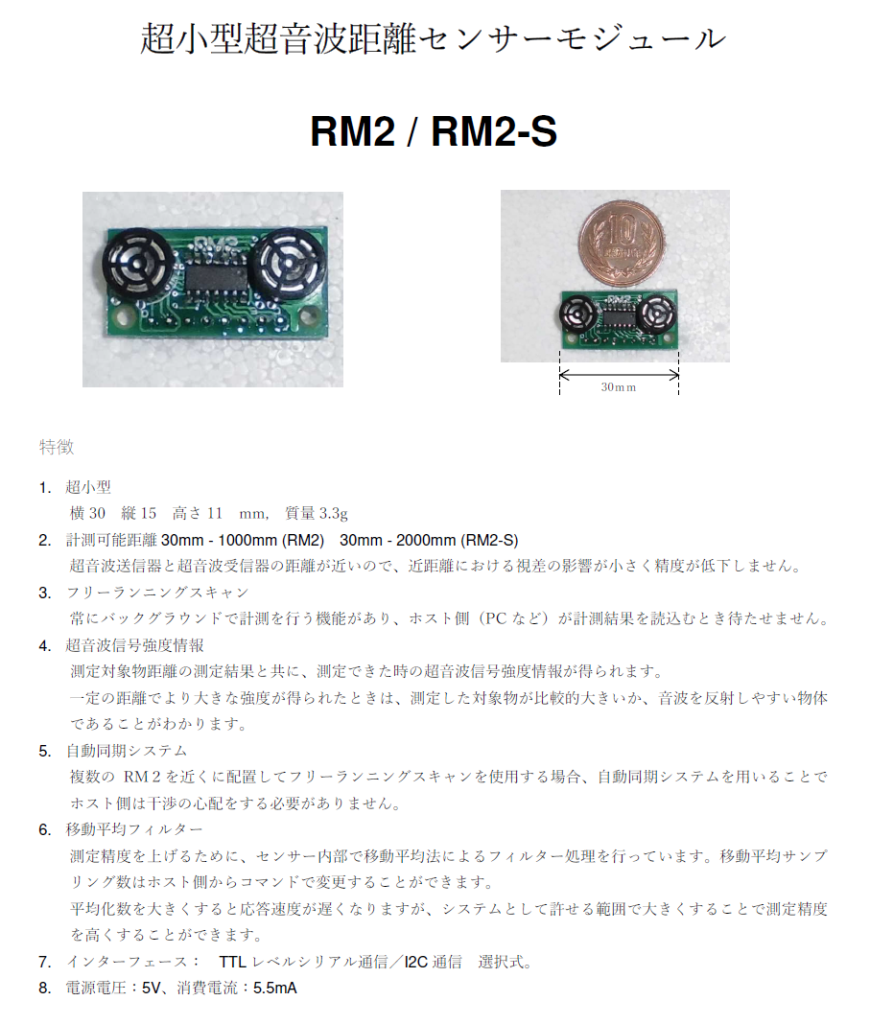 |
超音波式風向風速計を開発してきた知見を活かしてオーソドックスな超音波式距離センサーを製作してみました。
超音波スピーカーとレシーバーの間隔を短くすることで小型化を実現し、従来にない超小型のホビーロボット向け距離センサーを実現しました。
一般的にスピーカーとレシーバーの距離が近すぎると単純な方法では残響が発生して近い距離を計測できなくなってしまいますが、発射する超音波の強さを変化させながらスキャンすることで3cmから2mまでの広いダイナミックレンジで精確な測定をしています。
また、反射波が検出されたときの発射した超音波の強度から、逆に検出対象物の音波反射度合も知ることができるようになっています。
インターフェースはシリアル通信とI2Cに対応しています。
詳細な仕様は取扱説明書をご覧ください。
[取扱説明書]
Arduino unoからI2C接続で動作を試すためのサンプルスケッチを用意しました。
Arduino unoがI2Cとシリアルポートの間を中継することで測定結果をArduino uno IDEのシリアルモニターやターミナルソフトから見ることができ、逆にコマンドを送ることもできます。
また、5センサーまでのマルチ接続も試すことができます。
[I2C接続サンプルスケッチ]
| 距離検出のデモンストレーションです。 | |
| 超小型距離センサーを使った簡易な障害物回避ロボットを試作してみました。 |