 風向風速計
風向風速計 超音波センサー&ロボット
超音波センサー&ロボット超小型超音波距離センサーを備えていて、障害物を回避しながら走行することができます。
Bluetoothモジュールを装着することでリモコン操縦するなどの遊び方もできます。
また、ドロイド君フェイスパネルの他に自作のフェイスパネルを取付けることもできます。
マイコンはArduino PRO miniを採用していて自由に自作のスケッチをアップロードできますので、プログラミング入門用のツールとしても最適です。
|
| デモスケッチMB_demoをアップロードしたUSドロイド君のリモコン操作デモです。 スマホからリモコン操作で直進、左右旋回などができ、同時に超音波スキャナーを使った衝突回避が実現されています。 リモコンアプリの設定手順 | |
| デモスケッチMB_demoは、リモコン操縦の他に振付データーをアップロードしてマイコンのEEPROMに書き込むことで、簡単に自律走行させることができるようになっています。 振付データーの作成手順 | |
| USドロイド君はArduino PRO miniに自作のスケッチをアップロードすることで自由にプログラミングできます。 プログラミング入門用のサンプルスケッチMB_simpleは、モーター制御のコードがライブラリになっていますので、容易に自作プログラムを開発することができます。動画はMB_simpleを実行中です。 MB_simpleのアップロード手順 |
|
| USドロイド君はモーターの回転数を検出していないため、デフォルトの設定ではモーターのばらつきによって直進できずに曲がっていってしまうことがあります。 そのような場合は、デモスケッチMB_demoとスマホのBluetoothターミナルアプリを使ってトリム調整をすることで改善することができます。 トリム調整手順 |
|
|
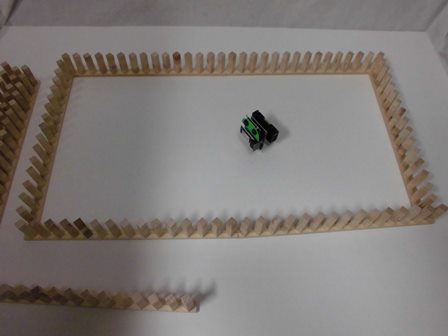
USドロイド君は走行用のタイヤの径が非常に小さいので、平らで適度な摩擦のある床の上でないと走行できません。 また、超音波センサーを備えているので障害物を回避して走行することができますが、残念ながら検出が苦手な条件もあります。 ここでは、USドロイド君が走行するための床と壁(アリーナと呼んでいます)の作り方を紹介します。 USドロイド君走行用アリーナの作り方 |
|
USドロイド君のオリジナルフェースパネルの作り方を紹介します。 オリジナルフェースパネルの作り方 |
Android ロボットは、Google が作成および提供している作品から複製または変更したものであり、Creative Commons 3.0 Attribution ライセンスに記載された条件に従って使用しています。